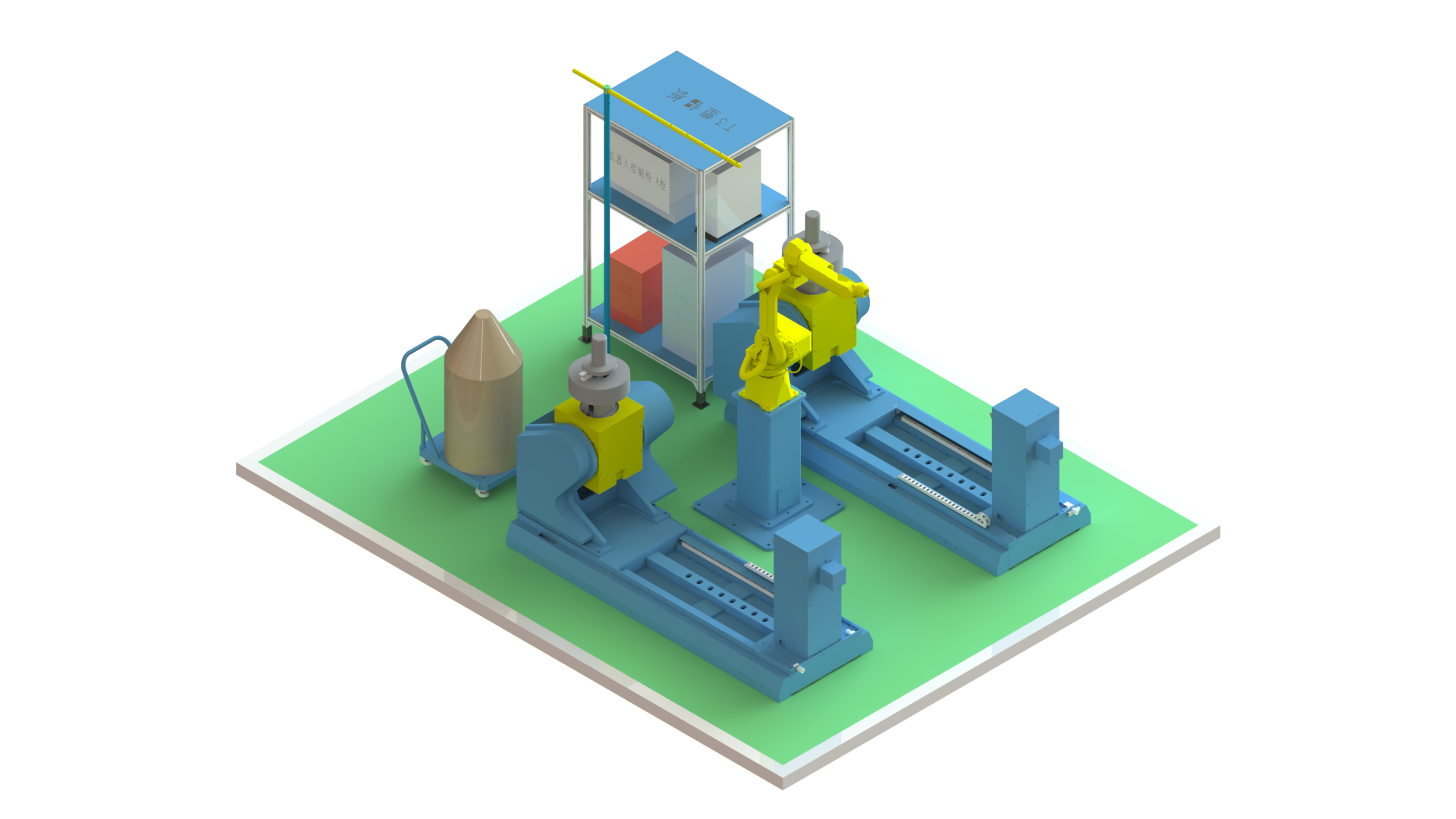
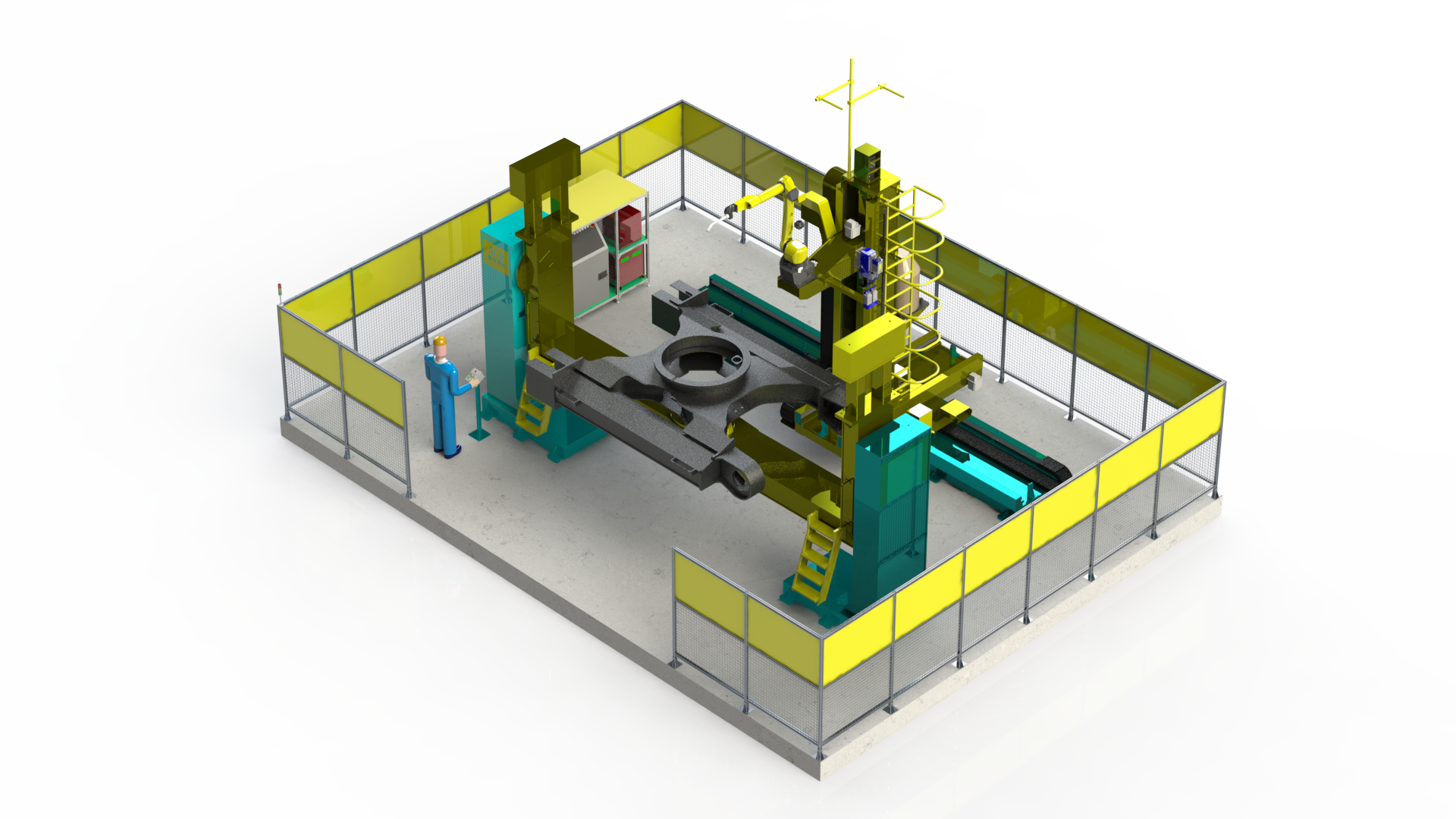
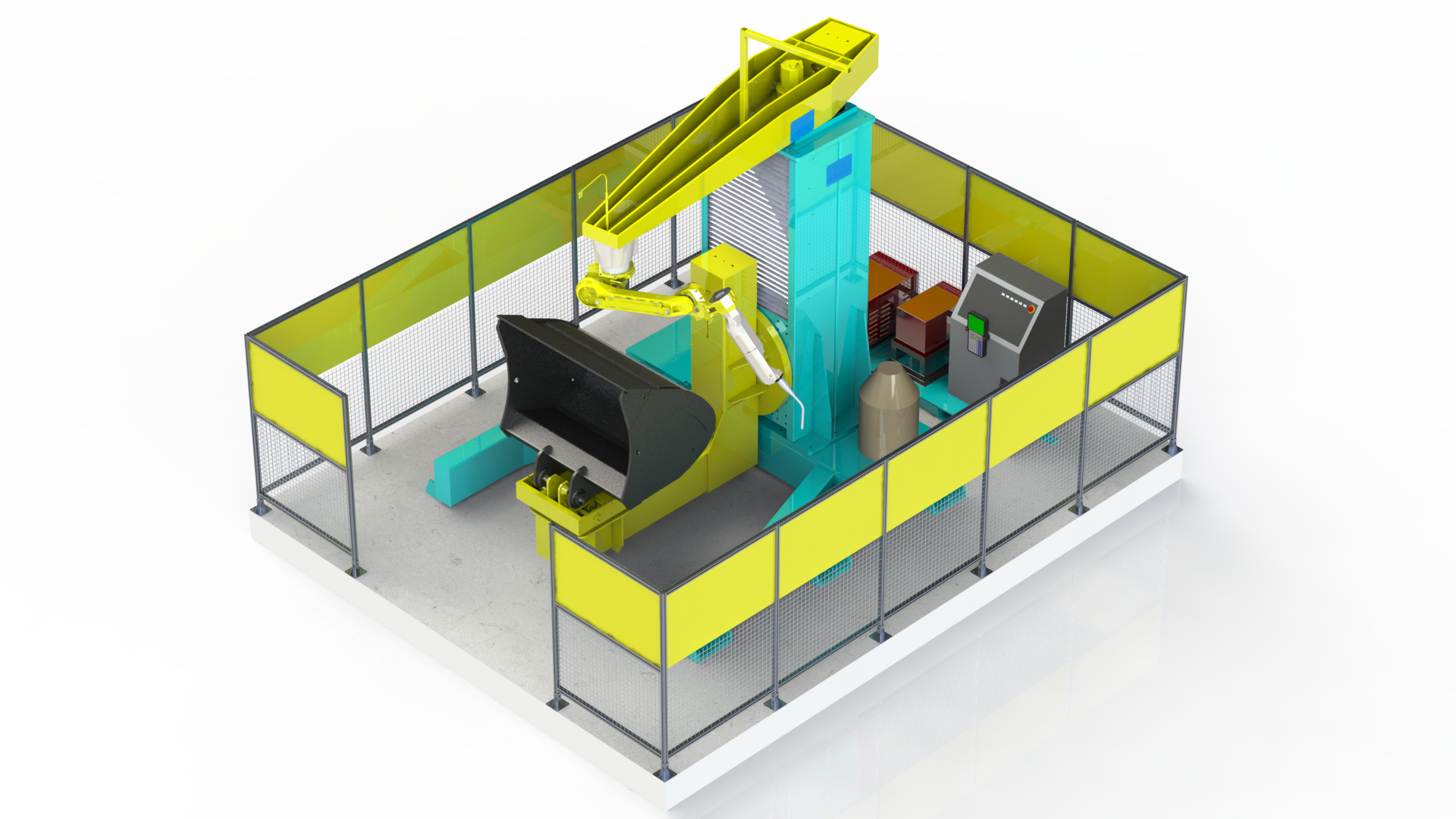
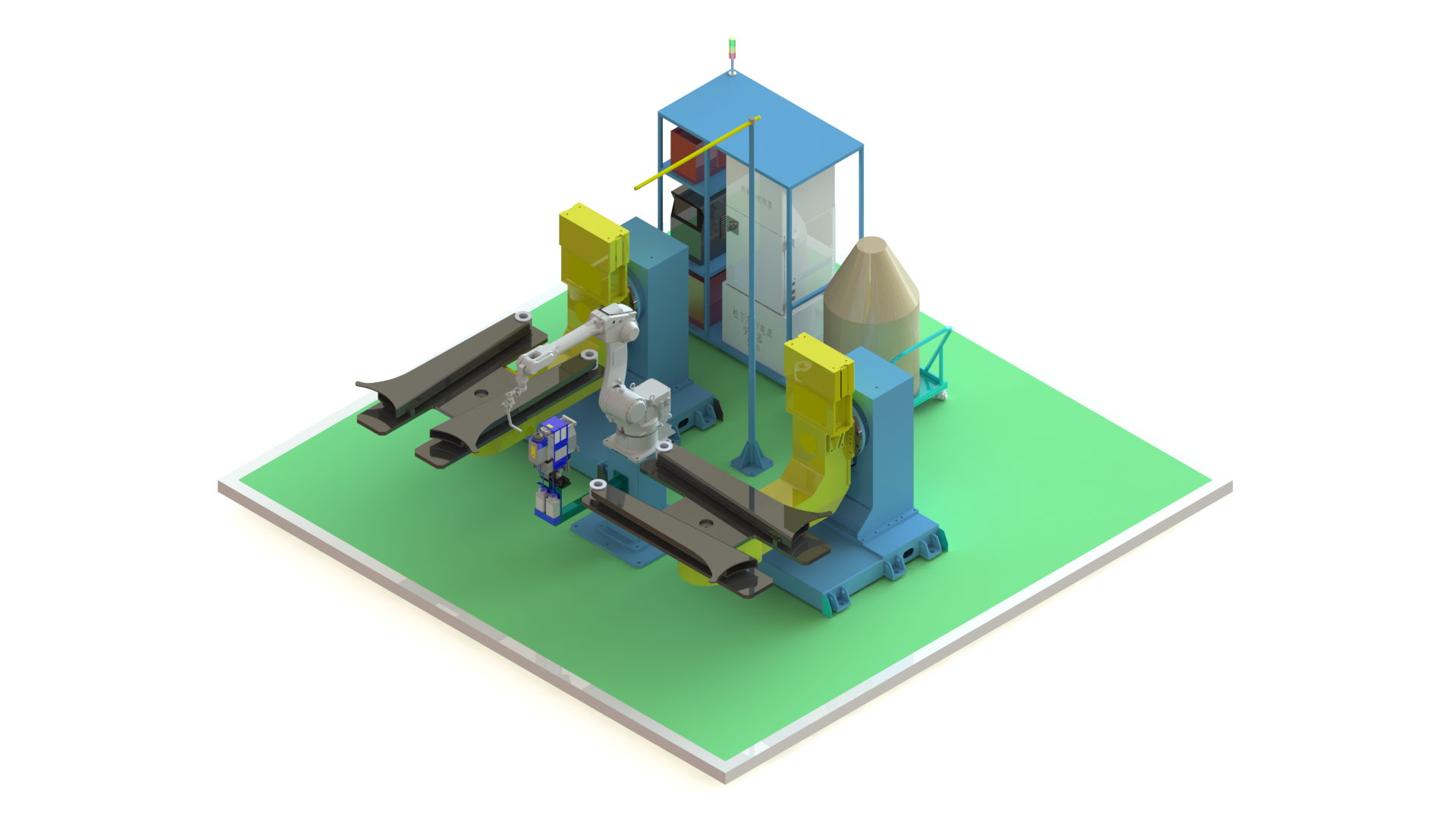
动臂斗æ†äº§çº¿
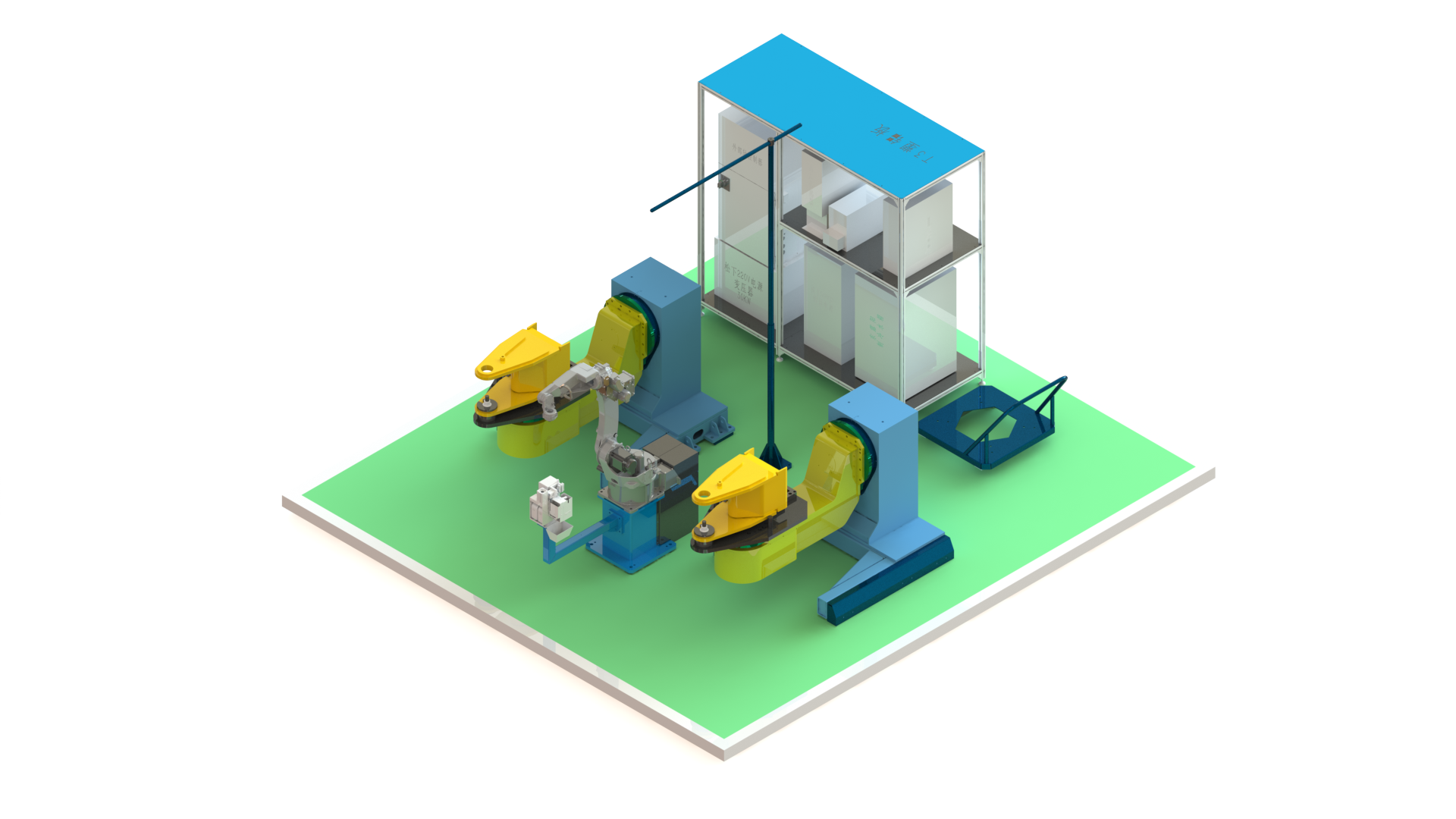
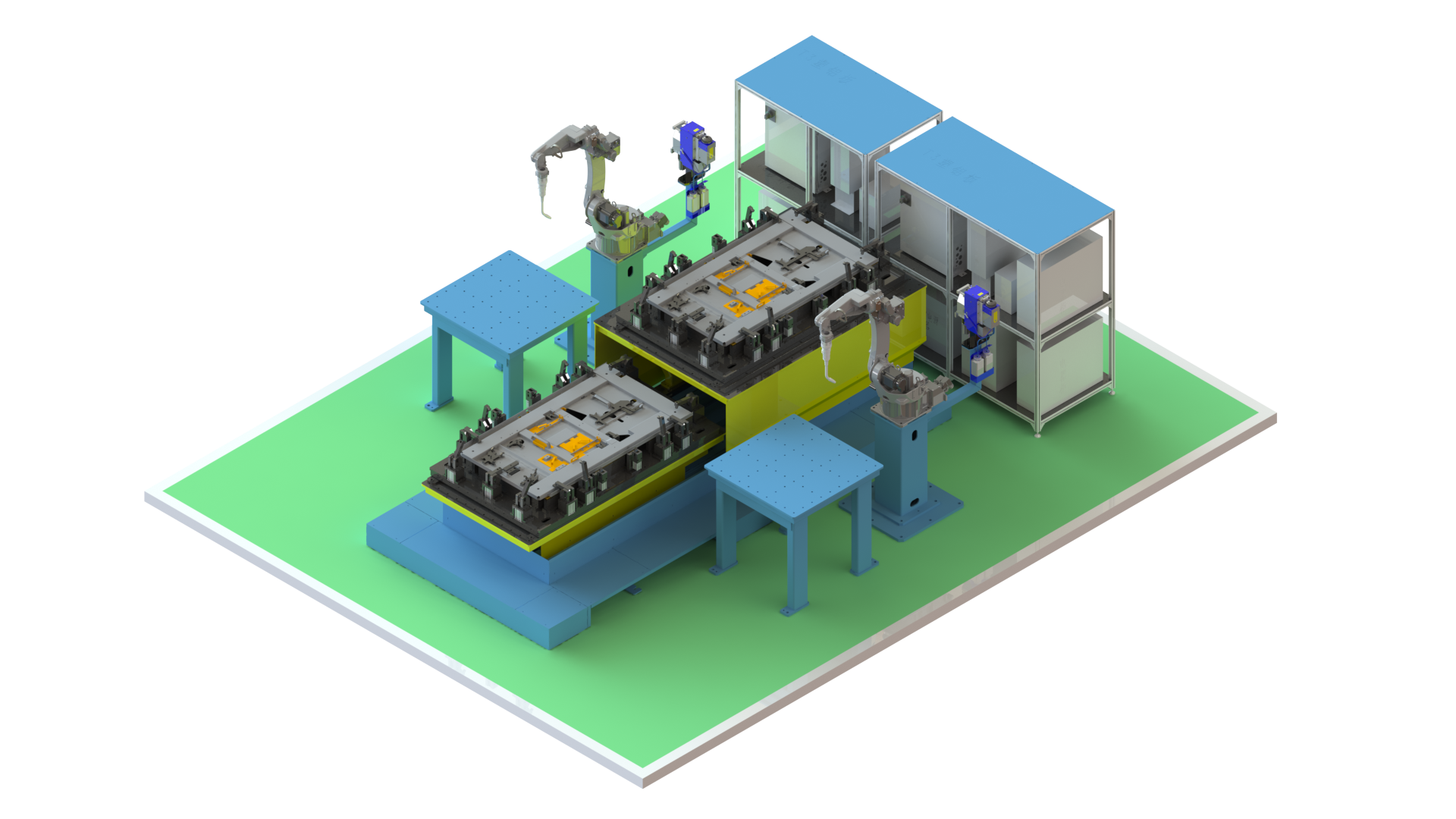
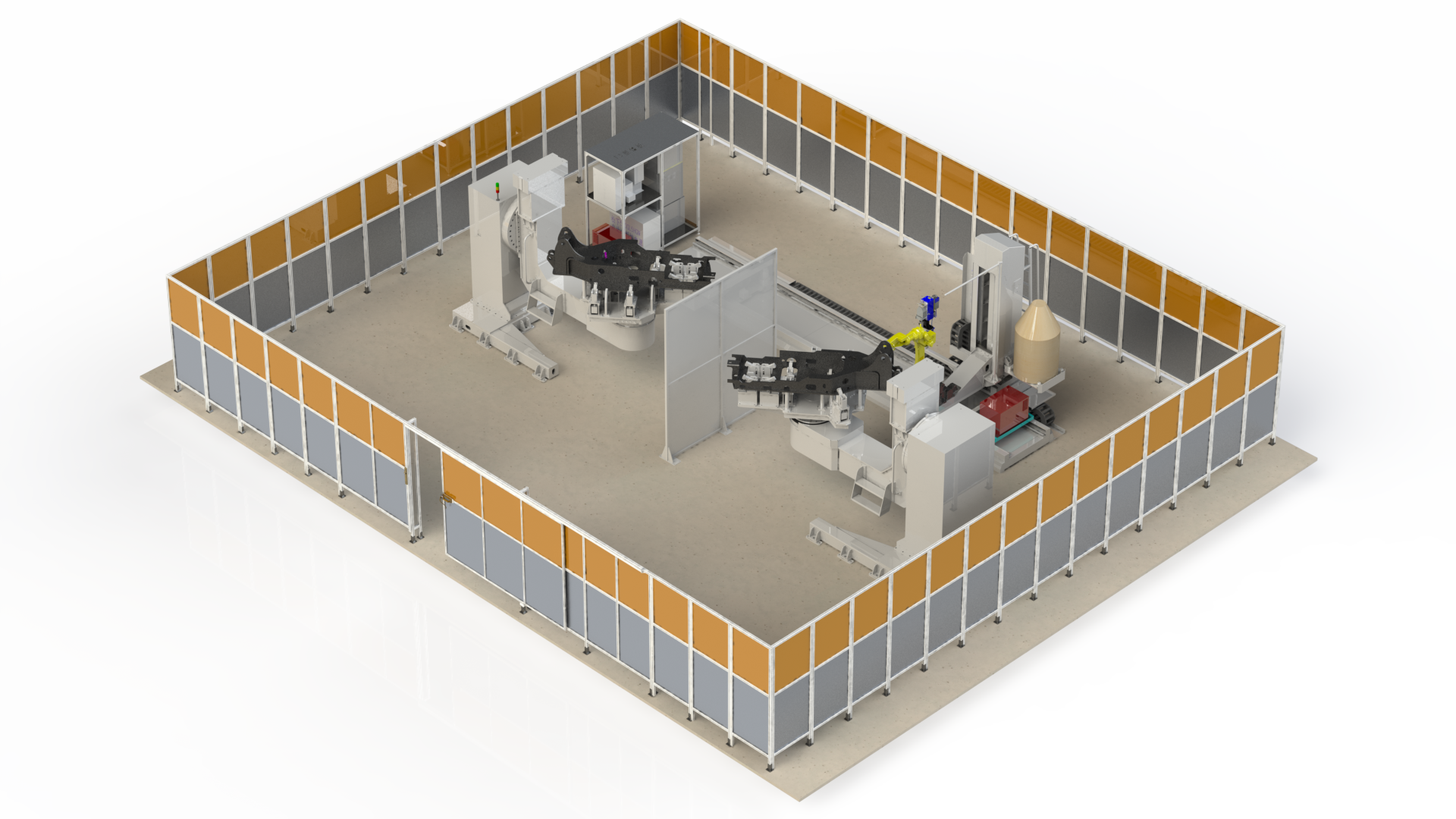
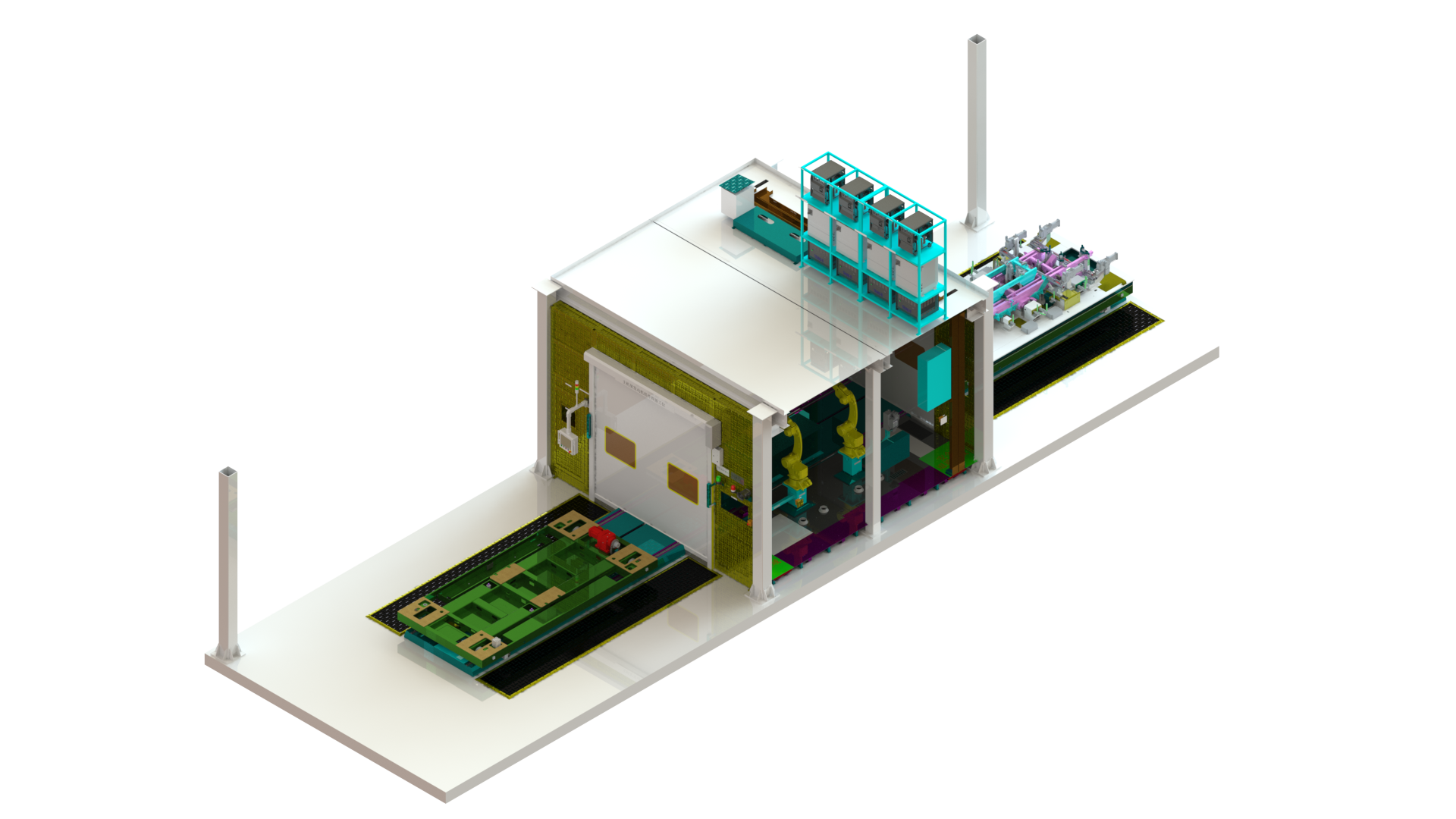
针对挖æ˜æœºåŠ¨è‡‚ç ”å‘的机器人焊æ¥ç³»ç»Ÿï¼Œæœ‰ä¸°å¯Œçš„æ¥è§¦ä¼ 感和电弧跟踪功能,适用äºå„ç§ç„Šç¼å½¢å¼çš„ç„Šæ¥ã€‚å˜ä½æœºçš„ä»åŠ¨ç«¯è®¾æœ‰æ»‘动调整机æ„,å¯ä»¥é€‚应工件长度å˜åŒ–。
åŒæœºå™¨äººåŒæ—¶ç„Šæ¥ï¼Œå‡å°ç„Šæ¥å˜å½¢ï¼Œç”Ÿäº§æ•ˆç‡é«˜ã€‚